本文属于「征服LeetCode」系列文章之一,这一系列正式开始于2021/08/12。由于LeetCode上部分题目有锁,本系列将至少持续到刷完所有无锁题之日为止;由于LeetCode还在不断地创建新题,本系列的终止日期可能是永远。在这一系列刷题文章中,我不仅会讲解多种解题思路及其优化,还会用多种编程语言实现题解,涉及到通用解法时更将归纳总结出相应的算法模板。
为了方便在PC上运行调试、分享代码文件,我还建立了相关的仓库:https://github.com/memcpy0/LeetCode-Conquest。在这一仓库中,你不仅可以看到LeetCode原题链接、题解代码、题解文章链接、同类题目归纳、通用解法总结等,还可以看到原题出现频率和相关企业等重要信息。如果有其他优选题解,还可以一同分享给他人。
由于本系列文章的内容随时可能发生更新变动,欢迎关注和收藏征服LeetCode系列文章目录一文以作备忘。
给你一个有根节点 root 的二叉树,返回它 最深的叶节点的最近公共祖先 。
回想一下:
- 叶节点 是二叉树中没有子节点的节点
- 树的根节点的 深度 为
0,如果某一节点的深度为d,那它的子节点的深度就是d+1 - 如果我们假定
A是一组节点S的 最近公共祖先,S中的每个节点都在以A为根节点的子树中,且A的深度达到此条件下可能的最大值。
示例 1:
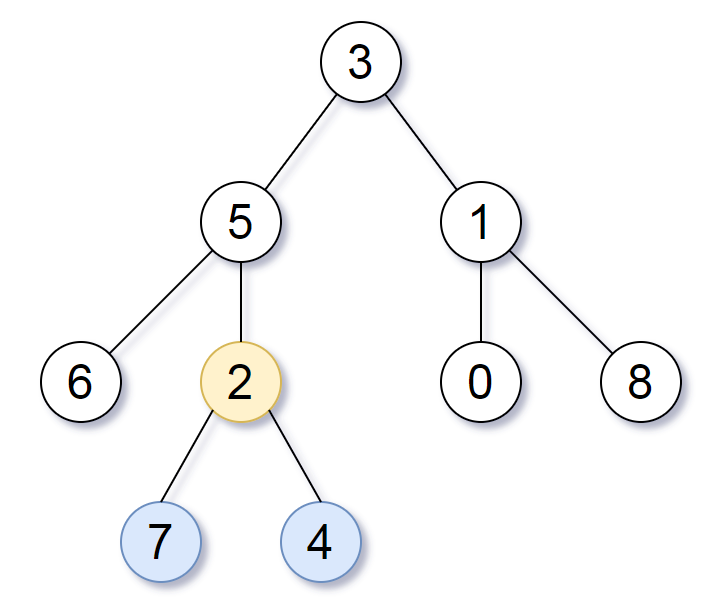
输入:root = [3,5,1,6,2,0,8,null,null,7,4]
输出:[2,7,4]
解释:我们返回值为 2 的节点,在图中用黄色标记。
在图中用蓝色标记的是树的最深的节点。
注意,节点 6、0 和 8 也是叶节点,但是它们的深度是 2 ,而节点 7 和 4 的深度是 3 。
示例 2:
输入:root = [1]
输出:[1]
解释:根节点是树中最深的节点,它是它本身的最近公共祖先。
示例 3:
输入:root = [0,1,3,null,2]
输出:[2]
解释:树中最深的叶节点是 2 ,最近公共祖先是它自己。
提示:
- 树中的节点数将在
[1, 1000]的范围内。 0 <= Node.val <= 1000- 每个节点的值都是 独一无二 的。
注意: 本题与力扣 865 重复:https://leetcode-cn.com/problems/smallest-subtree-with-all-the-deepest-nodes/
解法1 递归
看上图(示例 1),这棵树的节点
3
,
5
,
2
3,5,2
3,5,2 都是最深叶节点
7
,
4
7,4
7,4 的公共祖先,但只有节点
2
2
2 是最近的公共祖先。
如果我们要找的节点只在左子树中,那么最近公共祖先也必然只在左子树中。对于本题,如果左子树的最大深度比右子树的大,那么最深叶结点就只在左子树中,所以最近公共祖先也只在左子树中。反过来说,如果右子树的最大深度大于左子树,那么最深叶结点就只在右子树中,所以最近公共祖先也只在右子树中。
如果左右子树的最大深度一样呢?当前节点一定是最近公共祖先吗?不一定。比如节点 1 1 1 的左右子树最深叶节点 0 , 8 0,8 0,8 的深度都是 2 2 2 ,但该深度并不是全局最大深度,所以节点 1 1 1 并不能是答案。
根据以上讨论,正确做法如下:
- 递归这棵二叉树,同时维护全局最大深度 maxDepth \textit{maxDepth} maxDepth 。
- 在「递」的时候往下传 d e p t h depth depth ,用来表示当前节点的深度。
- 在「归」的时候往上传当前子树最深叶节点的深度。
- 设左子树最深叶节点的深度为 leftMaxDepth \textit{leftMaxDepth} leftMaxDepth ,右子树最深叶节点的深度为 rightMaxDepth \textit{rightMaxDepth} rightMaxDepth 。如果 leftMaxDepth = rightMaxDepth = maxDepth \textit{leftMaxDepth}=\textit{rightMaxDepth}=\textit{maxDepth} leftMaxDepth=rightMaxDepth=maxDepth ,那么更新答案为当前节点。注意这并不代表我们找到了答案,如果后面发现了更深的叶节点,那么答案还会更新。
class Solution {
public:
TreeNode *lcaDeepestLeaves(TreeNode *root) {
TreeNode *ans = nullptr;
int max_depth = -1; // 全局最大深度
function<int(TreeNode*, int)> dfs = [&](TreeNode *node, int depth) {
if (node == nullptr) {
max_depth = max(max_depth, depth); // 维护全局最大深度
return depth;
}
int left_max_depth = dfs(node->left, depth + 1); // 获取左子树最深叶节点的深度
int right_max_depth = dfs(node->right, depth + 1); // 获取右子树最深叶节点的深度
if (left_max_depth == right_max_depth && left_max_depth == max_depth)
ans = node;
return max(left_max_depth, right_max_depth); // 当前子树最深叶节点的深度
};
dfs(root, 0);
return ans;
}
};
复杂度分析:
- 时间复杂度: O ( n ) \mathcal{O}(n) O(n) 。每个节点都会恰好访问一次。
- 空间复杂度: O ( n ) \mathcal{O}(n) O(n) 。最坏情况下,二叉树是一条链,递归需要 O(n)\mathcal{O}(n)O(n) 的栈空间。
解法2 自底向上
也可以不用全局变量,而是把每棵子树都看成是一个「子问题」,即对于每棵子树,我们需要知道:
- 这棵子树最深叶结点的深度。这里是指叶子在这棵子树内的深度,而不是在整棵二叉树的视角下的深度。相当于这棵子树的高度。
- 这棵子树的最深叶结点的最近公共祖先 lca \textit{lca} lca 。
分类讨论:
- 设子树的根节点为 n o d e node node, n o d e node node 的左子树的高度为 leftHeight \textit{leftHeight} leftHeight , n o d e node node 的右子树的高度为 rightHeight \textit{rightHeight} rightHeight 。
- 如果 l e f t H e i g h t > r i g h t H e i g h t leftHeight>rightHeight leftHeight>rightHeight ,那么子树的高度为 leftHeight + 1 \textit{leftHeight} + 1 leftHeight+1 , lca \textit{lca} lca 是左子树的 lca \textit{lca} lca 。
- 如果 leftHeight < rightHeight \textit{leftHeight} < \textit{rightHeight} leftHeight<rightHeight ,那么子树的高度为 r i g h t H e i g h t + 1 rightHeight+1 rightHeight+1 , l c a lca lca 是右子树的 l c a lca lca 。
- 如果 leftHeight = rightHeight \textit{leftHeight} = \textit{rightHeight} leftHeight=rightHeight ,那么子树的高度为 leftHeight + 1 \textit{leftHeight} + 1 leftHeight+1 , l c a lca lca 就是 n o d e node node 。反证法:如果 l c a lca lca 在左子树中,那么 l c a lca lca 不是右子树的最深叶结点的祖先,这不对;如果 l c a lca lca 在右子树中,那么 l c a lca lca 不是左子树的最深叶结点的祖先,这也不对;如果 l c a lca lca 在 n o d e node node 的上面,那就不符合「最近」的要求。所以 l c a lca lca 只能是 n o d e node node。
class Solution {
pair<int, TreeNode*> dfs(TreeNode *node) {
if (node == nullptr)
return {0, nullptr};
auto [left_height, left_lca] = dfs(node->left);
auto [right_height, right_lca] = dfs(node->right);
if (left_height > right_height) // 左子树更高
return {left_height + 1, left_lca};
if (left_height < right_height) // 右子树更高
return {right_height + 1, right_lca};
return {left_height + 1, node}; // 一样高
}
public:
TreeNode *lcaDeepestLeaves(TreeNode *root) {
return dfs(root).second;
}
};
复杂度分析:
- 时间复杂度: O ( n ) \mathcal{O}(n) O(n) 。每个节点都会恰好访问一次。
- 空间复杂度: O ( n ) \mathcal{O}(n) O(n) 。最坏情况下,二叉树是一条链,递归需要 O ( n ) \mathcal{O}(n) O(n) 的栈空间。
更简洁的写法是:
class Solution {
public:
int depth[1010];
TreeNode* lcaDeepestLeaves(TreeNode* root) {
if (root == nullptr) return nullptr;
TreeNode* left = root->left, *right = root->right;
TreeNode* lcaLeft = lcaDeepestLeaves(root->left), *lcaRight = lcaDeepestLeaves(root->right);
int dl = left ? depth[left->val] : 0, dr = right ? depth[right->val] : 0;
depth[root->val] = max(dl, dr) + 1;
if (dl > dr) return lcaLeft;
if (dr > dl) return lcaRight;
return root;
}
};